Locos robots para rehabilitación y fisioterapia en Gifu, Japón

リハビリは、ロボット!
La Universidad de Gifu tiene un laboratorio de robótica (Kawasaki and Mouri laboratory) donde se desarrollan algunas ideas de robots para rehabilitación y fisioterapia muy curiosas. El laboratorio pertenece al "Departamento de Ingeniería de Sistemas de Información Humanos" de la Escuela de Ingeniería. Os cuento algunos de ellos:
1º Sistema de apoyo para ejercicios autopasivos y autoasistidos del brazo, la muñeca y la mano. 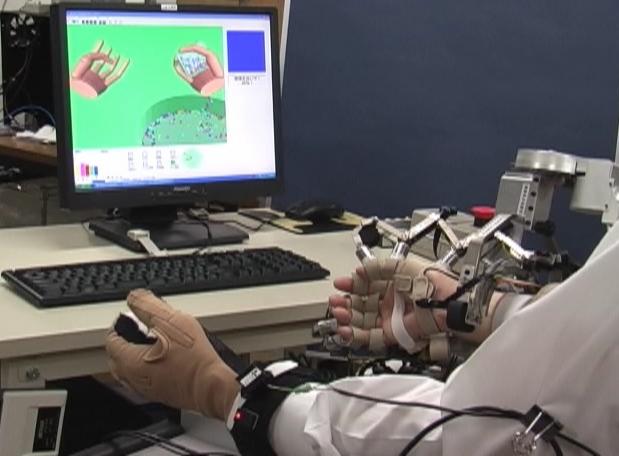
La idea es que los movimientos del lado sano se capten mediante los sensores de un guante y un robot los reproduzca con la mano y brazos paralizados ( como tratamiento para hemiplejias).


Ventana externa
Se ve mejor en el vídeo.
2º Mano robótica sensorizada para entrenamiento de terapeutas.

Se trata de una mano y muñena robótica a modo de maniquí de prácticas. Se pueden simular en ella diferentes patologías como rigideces de diferentes articulaciones. El estudiante de fisioterapia es evaluado gracias a las mediciones de los sensore de la mano robot. Los profesores pueden recomendar ser más suave o ejercer más fuerza o examinar a sus alumnos con esta mano. El propio sistema puede advertir de cuando la presión ejercida llega a provocar demasiado dolor en el hipotético paciente.
El simulador está a la altura de los mejores maniquís de entremaniento médico que se utilizan para practicar reanimación cardiopulmonar, partos, operaciones odontológicas y otras. ¿Será esta la forma de objetivar el aprendizaje práctico de los fisitoterapeutas mediante un examen en pacientes simulados?

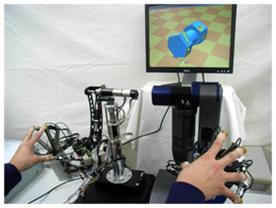
3º Telerehabilitación de la mano. Manipulación remota.

Realmente no se me ocurren aplicaciones reales para este proyecto salvo la extrañísima idea de tratar con fisioterapeutas que estén en la Tierra a pacientes orbitando en una estación espacial. Dudo que con la distancia la velocidad de conexión fuera suficiente para una buena interacción en tiempo real.
Para el resto de pienso que sería mejor trasladar al fisioterapeuta o al paciente.
En lo que consiste es básicamente en que el terapeuta actuaría sobre una mano robótica y todas sus acciones serían transmitidas por internet hasta un robot terapeuta que actuaría sobre el paciente con el mayor realismo posible. Es mucha complejidad para hacer algo que estando cerca no necesita ningún artificio, pero significaría lograr algo que está bastante de moda y que se llama TELEPRESENCIA. Sirve por ejemplo para manejar un robot en una central nuclear desde un distancia segura y sentir qué es lo que toca el robot en tus propias manos.Eso sí, como fisioterapeuta remoto me parece complicarse mucho.

Como aplicación más deseable estaría la de poder dar la mano y tocar a una persona querida cuando te comunicas por videoconferencia. Y yo no sé si la industria del porno tendría algo que opinar. Al fin y al cabo han sido pioneros en internet, mueven millones y son expertos en buscar a gente con todo tipo de gustos peculiares.

4º Sistemas hápticos por oposición de dedos.

Esta es una idea que ya se ha utilizado en rehabilitación y se llama Háptica. Consiste en recrear el tacto y las sensaciones de tocar objetos en tu mano, pero sin que esos objetos existan realmente. El resulado es bastante creíble y así se puede conseguir que una persona sienta que sujeta una tuerca y un tornillo que costarían 20 euros utilizando una máquina que cuesta 200.000 euros. (precios aproximados).
Versiones más baratas se han utilizado en los videojuegos para sentir el retroceso de un arma que no existe más que en la pantalla o hacerte sentir tocar los escenarios.


Básicamente las aplicaciones para rehabilitación chocarían con una ley básica de la realidad virtual: no hagas virtual algo que es más fácil construir en la realidad.
Sin embargo sí es una tecnología muy válida para manipular prototipos de máquinas que aún no han sido construídas o para entrenar situaciones complejas como cirugías, manejo de maquinaria, soldadura submarina y otras similares.
También puede tener aplicaciones en neurociencias para evaluar estímulos y respuestas y comprender así mejor el cerebro. Muchas veces es necesario saber que el estímulo aportado es idéntico para poder cuantificar la variación en las respuestas.
5º Estudio de señales biológicas para sistemas robóticos
Otro proyecto relacionado es el control de un robot utilizando señales de EMG. Esto podría tener aplicaciones en la construcción de prótesis biónicas y neuroprótesis. Aunque también para facilitar la telepresencia o teleoperación de robots de forma remota. Al sujeto que maneja el robot además se le pueden aportar señales hápticas para que sienta lo que el robot toca. Dando la percepción de ser el propio robot, ver lo que el ve, tocar lo que él toca, oír lo que él oye. Básicamente es el tipo de unión que desearíamos para una prótesis biónica o para una película de ciencia ficción con supervillanos conquistando el mundo.

_______________________________________
Si quereís ver otros proyectos japoneses sobre robótica entrad en la web de la RSJ, The Robotics Society of Japan.

En la web de la RSJ, Robotics Society of Japan se puede acceder a este directorio de laboratorios de robótica japoneses.
Entre ellos se pueden encontrar laboratorios con investigación en robótica relacionada con la rehabilitación, la tecnología asistencial o la biomecánica. Además de los mejores proyectos de robótica japoneses con aplicaciones de todo tipo. Aquí os dejo algunos de los que investigan en rehabilitació:
1-Univesidad de Saitama ,
Escuela de Ingeniería.

 Rehabilitation Robot
Rehabilitation Robot2- Universida de Ritsumeikan
Proyectos. (la web en inglés se ha quedado anticuada).
3-El Instituto Nara de Ciencia y Tecnología.

Web de sus proyectos, en japonés.

Sistemas de captura del movimiento humano de gran precisión con aplicaciones en biomecánica humana. Web de la empresa Xsens Tecnology, de la que ya hablé en otra entrada.

Ala: リハビリテーション工学!
Deberías poner un enlace a la fuente original
ResponderEliminarhttp://rehabilitacionblog.com
Mi blog está escrito con licencia Creative Communs que exige ser citado para usar el material.